You probably all know that you can easily access files on connected devices using the sidebar items in the Files application. Most of you also know that the Other Locations view provides access to internal storage and some other discovered services. But I have recently noticed that some people are completely unaware of the ability to connect to locations that are not propagated by our volume monitors or discovery backends. And even if people are aware of this option, they often don’t know which locations are supported. So I decided to write this blog spot to summarize what all URI schemes are handled by the GVfs project for use by the Files and other GNOME applications.
Connecting to locations
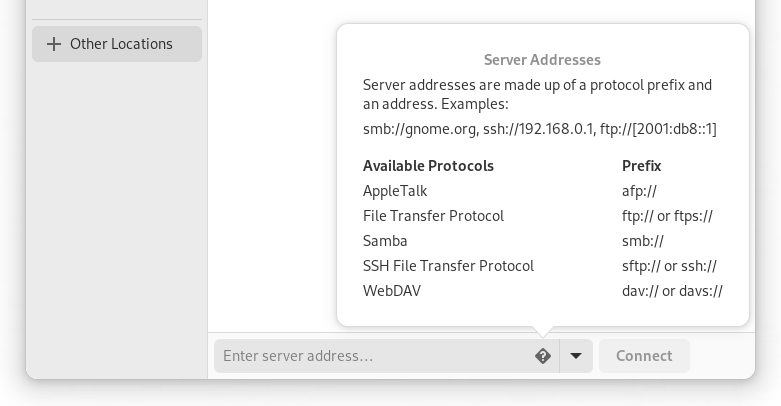
For locations that are not automatically propagated, there is the following bar in the Other Locations view of the Files application. You can enter a URI and press the Connect button to mount some additional locations. The question mark icon suggests some of the URI schemes you can use.
Network protocols
To connect to devices on your network, cloud providers, or web hostings, there is a list of network protocols that can be used:
- SMB – Uses the
smb:// scheme, so e.g. smb://host/share.
- FTP – There are 3 different protocol schemes for the FTP protocol:
ftp:// for unencrypted connectionftps:// for explicit SSL/TLS encryptionftpis:// for implicit SSL/TLS encryption
- SFTP – Uses the
sftp:// scheme (the ssh:// alias can also be used).
- WebDAV – There are the
dav:// and davs:// schemes, corresponding to the HTTP and HTTPS variants.
- NFS – Uses the
nfs:// scheme. Only NFSv2 and NFSv3 protocol versions are supported.
- AFP – Uses the
afp:// scheme.
Just a note that there is also support for the HTTP protocol over the http:// and https:// schemes, although this is not intended to be used through the Files application.
Network discovery
Available locations on your local network can be automatically listed in the Other Locations view thanks to the network backend (the network:// scheme). The network backend merges results from other backends that implement the DNS-SD/mDNS and NetBIOS protocols (these use the dns-sd:// and smb:// schemes).
NetBIOS-based discovery has been deprecated along with the NT1 protocol, which is why the Windows Network folder in the Other Location view is empty in most cases. Instead, Microsoft relies on the WS-Discovery protocol. This is not yet supported by the GVfs project but it is in development.
Connected devices
Connected devices are always propagated by volume monitors and are not expected to be mounted manually. Cell phones, cameras, and audio players typically use the MTP, PTP, and AFC protocols (with the mtp://, gphoto2://, and afc:// schemes). Mass storage devices (e.g. portable flash disks and hard disks) and optical disks are announced via the UDisks2 volume monitor and use the file:// scheme. Only audio disks are accessible via the cdda:// scheme.
There is also a special burn:// scheme for blank optical media, but Brasero integration is currently broken.
Online Accounts
The Online Accounts panel in the Settings application allows users to configure their Nextcloud and Google accounts, among others. You can then easily access your files from these providers via the sidebar items in the Files application. These are propagated through the GOA volume monitor and use the davs:// and google-drive:// schemes.
Just a note that Google Drive support has not been ported to libsoup3 and may be unavailable soon. By the way, OneDrive support is in the works.
Special locations
The GVfs project also provides some special locations. The recent:// scheme allows you to browse recent files. The admin:// scheme allows you to access files with elevated privileges. The archive:// scheme can be used to browse archive files without extracting them. It was supposed to be integrated into the Files application, but that never happened. Not sure if anyone uses it today. The computer:// scheme is used to provide a list of connected devices. It is no longer used by the Files application, but some other file managers still use it.
For completeness, there are also the test:// and localtest:// schemes for testing purposes.
The specific list of supported locations is always dependent on the installed packages, but mainstream distributions should have most of them installed by default. I hope this gives you a better idea of the locations provided by the GVfs project that are available in GNOME. Which protocols do you use most?